
More information: http://lexfridman.com/driverfrustration
Paper PDF: http://ijcai.org/Proceedings/16/Papers/195.pdf
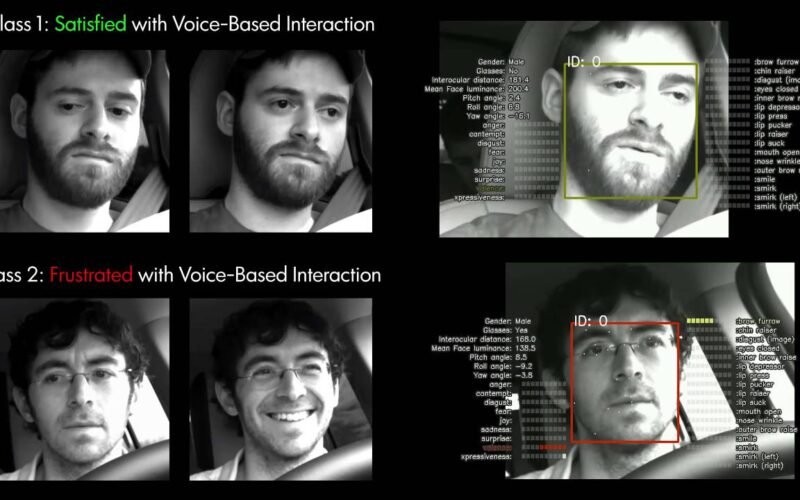
We present a method for detecting driver frustration from both video and audio streams captured during the driver’s interaction with an in-vehicle voice-based navigation system. The video is of the driver’s face when the machine is speaking, and the audio is of the driver’s voice when he or she is speaking. We analyze a dataset of 20 drivers that contains 596 audio epochs (audio clips, with duration from 1 sec to 15 sec) and 615 video epochs (video clips, with duration from 1 sec to 45 sec). The dataset is balanced across 2 age groups, 2 vehicle systems, and both genders. The model was subject-independently trained and tested using 4-fold cross-validation. We achieve an accuracy of 77.4% for detecting frustration from a single audio epoch and 81.2% for detecting frustration from a single video epoch. We then treat the video and audio epochs as a sequence of interactions and use decision fusion to characterize the trade-off between decision time and classification accuracy, which improved the prediction accuracy to 88.5% after 9 epochs.
CONNECT:
– If you enjoyed this video, please subscribe to this channel.
– AI Podcast: https://lexfridman.com/ai/
– Show your support: https://www.patreon.com/lexfridman
– LinkedIn: https://www.linkedin.com/in/lexfridman
– Twitter: https://twitter.com/lexfridman
– Facebook: https://www.facebook.com/lexfridman
– Instagram: https://www.instagram.com/lexfridman
– Slack: https://deep-mit-slack.herokuapp.com

